

智能AGV小车
2020-02-01 15:39:21
AGV小车(Automated Guided Vehicle,简称AGV)是一种装备有电磁、光学、机器视觉等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,工业应用中不需驾驶员的搬运车,以可充电之蓄电池为其动力来源。根据不同的场景,现推出两种类型的AGV小车:顶升型和叉车型。
总体结构:

先进的机器视觉导航系统:
视觉导航是机器视觉的综合应用,通过图像摄取装置将被摄取的目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和宽度、颜色等信息,转换成数字信号,图像系统对这些信号进行各种运算,抽取目标的特征,进而根据判别的结果来控制现场的设备动作。机器视觉的主要研目标是使计算机具有通过二维图像认知三维坏境信息的能力,能够感知与处理三维环境中物体的形状、位置、姿态、运动等几何信息。
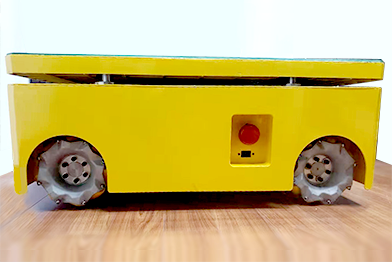
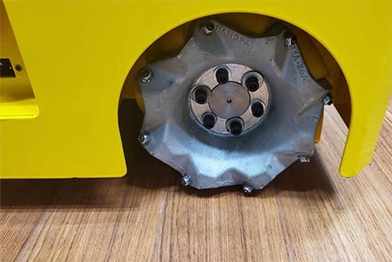
样机展示:

顶升型AGV1500设备参数:
总体结构:
先进的机器视觉导航系统:
视觉导航是机器视觉的综合应用,通过图像摄取装置将被摄取的目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和宽度、颜色等信息,转换成数字信号,图像系统对这些信号进行各种运算,抽取目标的特征,进而根据判别的结果来控制现场的设备动作。机器视觉的主要研目标是使计算机具有通过二维图像认知三维坏境信息的能力,能够感知与处理三维环境中物体的形状、位置、姿态、运动等几何信息。
样机展示:
顶升型AGV1500设备参数:
| 外形尺寸 | L900*W680*H350(MM) |
| 走行方式 | 视觉导引 |
| 走行方向 | 前进,左/右转、原地旋转 |
| 通讯功能 | 无线局域网/蓝牙 |
| 驱动方式 | 差速驱动 |
| 驱动电源 | DC48V |
| 负载能力 | 500kg |
| 本体机种 | 潜伏式/顶升型 |
| 走行速度 | 5-60m/min |
| 转弯半径 | 最小可达0mm |
| 导航精度 | ±10mm |
| 爬坡能力 | ≤5° |
| 停止精度 | ±10mm |
| 感应范围 | ≤5m,可调,紧急制动距离 < 100mm |
| 充电方式 | 手动充电(自动充电可选) |
| 蓄电池 | 采用AGV专用60AH铅酸电池/锂电池 |
| 安全防护 | 前方障碍物检测传感器 + 机械防撞机构 (双重防护) |



